دوربین های مداربسته پیشرفته
یکی از ایرادات بزرگ سیستم های نسل گذشته، عدم توانایی تحلیل یا درک محتوای تصاویر یا صحنه های گرفته شده از دوربین های نظارتی بود که این گونه سیستمها وابسته به اپراتور انسانی بودند و توانایی محدودی در جستجو داشتند و در نتیجه امکان عکس العمل های فوری را غیرممکن می ساخت. برای رفع این مشکلات، افزودن توانایی تحلیل و درک محتوای تصاویر دوربین ها و رفتارهای اشیاء متحرک در صحنه های تحت نظارت می توانست راه گشا باشد.
واژه هوشمندی در سیستم های نظارت تصویری برای اولین بار در تشخیص حرکت توسط دوربین، آغاز فرایند ضبط، ایجاد هشدار و یا تحریک یک دستگاه جانبی ارائه شد. ابتدا این تشخیص توسط حسگرهای PIR موجود در دوربین بود که با پیشرفت پردازشگرهای دوربین مدار بسته این امر به یکی از قابلیت های دوربین ها تبدیل شد. از این هوشمندی اولیه چند سالی بیش نمی گذشت که شرکت های بزرگ اقدام به تقویت پردازشگرهای دوربین های خود نموداند و به پشتوانه آن قابلیت های زیادی همچون تشخیص حرکت در زمینه”، شمارش، دیوار مجازی و غیره، به دوربینها افزوده شده است که گاها تأثیر مستقیم بروی کیفیت تصویر داشته است. البته در حال حاضر سازنده ها این قابلیت ها را در دوربین های حرفه ای خود ارائه نموده اند.
جهت مبحث هوشمندسازی دوربین های مداربسته، برخی از شرکتها استانداردهای برنامه نویسی برای شرکت های متخصص در زمینه پردازش تصویر ایجاد کرده اند به نحوی که برنامه نویسی جهت این امر به صورت ماژولار انجام شود.
این امکانات تا حدودی راهگشای نیازهای جدید در سیستم های نظارتی شده است. مبحث تشخیص و جلوگیری از بروز اتفاقات و همچنین مقوله های آماری در حوزه مدیریت با مبحث سیستم های دوربین مدار بسته پیوندی کاربردی ایجاد کرده است. در ادامه به بررسی چندین مورد به صورت دقیق پرداخته و مزایا و معایب استفاده از آنها ذکر می شود.
توانایی تفکیک انسان
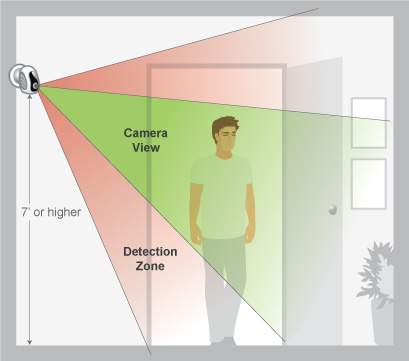
افزودن سیستم توانایی تفکیک انسان از سایر اشیاء متحرک در تصاویر ویدئویی نیز از دیگر اهدافی بود که با مطرح شدن هوشمندسازی دوربین ها و ارائه نسل جدید از تجهیزات نظارت تصویری به واقعیت پیوست. سیستم های نظارت تصویری پیشرفته می توانند با بررسی بیومتریک های رفتاری و ظاهری (شیوه راه رفتن و شکل ظاهری چهره)، علاوه بر تشخیص هویت افراد، حالات و وضعیت و رفتارهای تعاملی فرد با محیط را نیز تشخیص دهند.
این سیستم تصاویر را از دوربین ها گرفته و پس از مراحل پیش پردازش که در آن عملیات مربوط به ارتقاء سطح کیفی تصاویر به منظور بالابردن سطح ادراکی سیستم از تصاویر صورت می گیرد، عملیات مربوط به آنالیز محتوایی تصاویر با استخراج ویژگیها و تطبیق آنها، و استفاده از تحلیل آماری و هوش مصنوعی، و در نهایت تشخیص و تعبیر صورت انجام می دهد. برای مثال اگر یک تصویر نمونه از چهره و یا چند فریم از راه رفتن فرد یا افراد (مثلا مجرمین تحت تعقیب) به سیستم داده شود، سیستم می تواند به محض حضور فرد در صحنه ها یا محیطهای عمومی تحت نظارت، او را کشف و به اپراتور مربوطه یا پلیس اعلام نماید. علاوه بر اینها سیستم توانایی درک رفتارهای انسانی در محیطها را چه به صورت انفرادی و چه به صورت تجمیعی و با دقت بالا را دارد. برای نمونه وقتی دو نفر به هم می رسند سیستم رفتارهای تعاملی آنها مانند احوال پرسی، صحبت کردن و بسیاری از حالات و وضعیت های روحی و روانی دیگر را نیز تشخیص می دهد، در حالتی دیگر سیستم توانایی تشخیص تجمعات و درگیری ها و نیز تحلیل رفتاری جمعیت مردمی در یک محیط را دارد. به دلیل بهره گیری از فن آوری هوش مصنوعی و یادگیری ماشینی به صورت نرم افزاری دارای قدرت خود تکاملی می باشد.
تشخیص حرکت پیشرفته
در این روش که در واقع بهینه یافته روش تشخیص حرکت ابتدایی است اجزای مختلف تصویر براساس حرکت دسته بندی می شوند و در واقع پردازشگر تصویری موجود در این دوربینها به بررسی مداوم هر یک از اجزای متحرک در تصویر اصلی یا در زمینه می پردازد. به طور مثال، در یک تصویر از خیابان تشخیص حرکت توسط دوربین مداربسته زمانی صحیح ارزیابی می شود که یک خودرو با موتورسیکلت یا انسان در تصویر حرکت کند در حالی که در سیستمهای اولیه، حرکت برگ درختان یا سایه ساختمانها و تجهیزات نیز منجر به تشخیص حرکت میشد.
دیوار های مجازی
در این روش بر اساس تصویر سه بعدی و ترسیم خطوط فرضی بروی تصویر، هر گونه عبور شی متحرک از خطوط فرضی منجر به تشخیص فرایند عبور از دیوارهای مجازی می شود. در این روش در حالت بهینه اندازه اشیاء عبوری، سایه اشیاء عبوری و موارد جزئی دیگر قابل تشخیص، تعریف و کنترل بوده تا از ایجاد هشدارهای خطا جلوگیری شود.
شمارش اشیاء
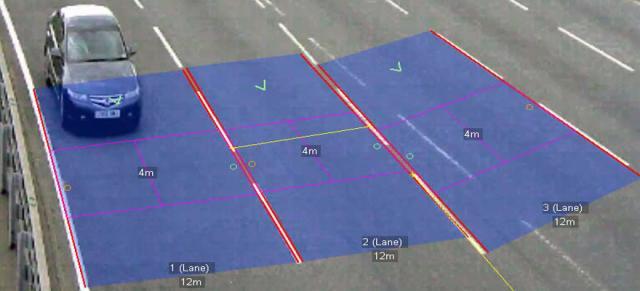
در این روش براساس تصویر سه بعدی و تعاریف تخصصی، شمارش اشیاء عبوری از یک خط فرضی در سایزهای مختلف انجام میشود که با توجه به میزان پیچیدگی تصویر، ممکن است تا ۵۰ پارامتر مختلف نیاز به تنظیم داشته باشد. لازم به ذکر است که این شمارش می تواند در جهت های مختلف انجام شود.
توقف غیرمجاز
در این الگوریتم پس از تشخیص شئ و توقف آن در محل از قبل تعیین شده، هشدار و یا فعالیت خاصی در خروجی دوربین فعال میشود. دقت این الگوریتم در سیستم های مختلف شامل تشخیص اتومبیل، شخص یا اشیاء متفاوت است. این الگوریتم به منظور کنترل فرایندهای ترافیکی، تشخیص تجمع ماشین آلات در محلی غیرمجاز و حتی باقی ماندن شیء در محل نامناسب کارآیی دارد
تشخیص شلوغی
در این الگوریتم زمانی که تغییر چگالی حجمی تصویر از حد معینی فراتر رود، فرایندهای تعریف شده فعال میشود. در واقع زمانی که تعداد افراد موجود در تصویر از حد خاصی بیشتر شود، الگوریتم تشخیص تجمع داده و مکانیزم های مربوطه فعال می شود. معمولا دقت در این الگوریتم تأثیری در عملکرد آن نداشته و عملکرد آن براساس تعداد اشیاء و یا تغییرات گرمایی تصویر تشخیص داده میشود.
این موارد جزء امکانات دروبین مداربسته در حوزه هوشمندسازی است اما عملکرد تک محوری هر دوربین در این حوزه تنها پاسخگوی نیازهای کوچک و کوتاه مدت در این خصوص بوده و دارای ضعفهای عدم مدیریت یکپارچه، عدم صحت اطلاعات جهت آمارگیری و عدم قابلیت برنامه ریزی به صورت گروهی در دوربین های مختلف است . در بسیاری از موارد جهت استفاده از این قابلیت ها در مکان های دیگر نیاز به جابجایی دوربین است.

